Label Format
This is compatible with the labels generated by Scalabel. The labels are released in Scalabel Format. A label json file is a list of frame objects with the fields below. Please note that this format is a superset of the data fields. For example, box3d may be absent if the label is a 2d bounding box, and intrinsics may not appear if the exact camera calibration is unknown.
Categories
Object Detection
For object detection, 10 classes are evaluated. They are:
1: pedestrian
2: rider
3: car
4: truck
5: bus
6: train
7: motorcycle
8: bicycle
9: traffic light
10: traffic sign
Note that, the field category_id range from 1 instead of 0.
Instance Segmentation, Box Tracking, Segmentation Tracking
For instance segmentation, multi object tracking (box tracking), and multi object tracking and segmentation (segmentation tracking), only the first 8 classes are used and evaluated.
Semantic Segmentation
Meanwhile, for the semantic segmentation task, 19 classes are evaluated. They are:
0: road
1: sidewalk
2: building
3: wall
4: fence
5: pole
6: traffic light
7: traffic sign
8: vegetation
9: terrain
10: sky
11: person
12: rider
13: car
14: truck
15: bus
16: train
17: motorcycle
18: bicycle
255 is used for “unknown” category, and will not be evaluated.
Panoptic Segmentation
For the panoptic segmentation task, 40 classes are evaluated. They are:
0: unlabeled
1: dynamic
2: ego vehicle
3: ground
4: static
5: parking
6: rail track
7: road
8: sidewalk
9: bridge
10: building
11: fence
12: garage
13: guard rail
14: tunnel
15: wall
16: banner
17: billboard
18: lane divider
19: parking sign
20: pole
21: polegroup
22: street light
23: traffic cone
24: traffic device
25: traffic light
26: traffic sign
27: traffic sign frame
28: terrain
29: vegetation
30: sky
31: person
32: rider
33: bicycle
34: bus
35: car
36: caravan
37: motorcycle
38: trailer
39: train
40: truck
Classes 1-30 are stuffs, 31-40 are things.
Drivable Area
For the drivable area task, there are 3 classes. They are:
0: direct
1: alternative
2: background
“Background” is not considered during evaluation.
Lane Marking
For the lane marking task, there are 3 sub-tasks: lane categories, lane directions, and lane styles. There are 9, 3, and 3 classes for each sub-task.
Lane Categories
0: crosswalk
1: double other
2: double white
3: double yellow
4: road curb
5: single other
6: single white
7: single yellow
8: background
Lane Directions
0: parallel
1: vertical
2: background
Lane Styles
0: solid
1: dashed
2: background
“Background” is not considered during evaluation.
Pose Estimation
For pose estimation, 18 classes (joints) are evaluated. They are:
0: head
1: neck
2: right_shoulder
3: right_elbow
4: right_wrist
5: left_shoulder
6: left_elbow
7: left_wrist
8: right_hip
9: right_knee
10: right_ankle
11: left_hip
12: left_knee
13: left_ankle
14: right_hand
15: left_hand
16: right_foot
17: left_foot
Attributes
BDD100K dataset has some specific properties.
Frame attributes
- weather: "rainy|snowy|clear|overcast|undefined|partly cloudy|foggy"
- scene: "tunnel|residential|parking lot|undefined|city street|gas stations|highway|"
- timeofday: "daytime|night|dawn/dusk|undefined"
Label attributes
- occluded: boolean
- truncated: boolean
- trafficLightColor: "red|green|yellow|none"
- areaType: "direct | alternative" (for driving area)
- laneDirection: "parallel|vertical" (for lanes)
- laneStyle: "solid | dashed" (for lanes)
- laneTypes: (for lanes)
Segmentation Formats
We provide labels for all segmentation tasks (semantic segmentation,
drivable area, lane marking, instance segmentation, panoptic segmentation,
and segmentation tracking) in both JSON and mask formats.
The JSON format saves each segmentation mask as either polygons or in RLE.
That poly2d used in JSONs is not of the same format as COCO.
Instead, the poly2d field stores a Bezier Curve with vertices and control points.
The rle used is consistent with COCO.
We now use RLE as the main format for segmentation tasks as it is much more
compact and easy to handle compared to the mask format, but the mask format is
still supported.
We do not allow overlap in the segmentation masks as each pixel should be assigned
a single category only.
During evaluation, predictions with overlaps will be ignored.
The mask format handles this naturally, but for the RLE format post-processing
is needed to remove overlaps.
We describe the mask format for each segmentation task below.
Semantic Segmentation
The ground-truth of each image is saved into an one-channel png (8 bits per pixel). The value of each pixel represents its category. 255 usually means “ignore”.
Lane Marking
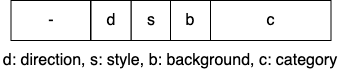
For lane marking, there are three sub-tasks: lane categories, lane direction and lane styles. A one-channel png file is used for each image to store all classes information. The format for a pixel is defined as the image below. The 3-th bit and the 4-th bit are for direction and style. The last 3 bits are for category. Most importantly, the 5-th bit is to indicate whether this pixel belongs to the background (0: lane, 1: background).
Instance Segmentation
The labels for instance segmentation, panoptic segmentation and segmentation tracking
are saved as bitmasks, where the labels for each image are stored in an RGBA png file.
For the RGBA image, the first byte, R, is used for the category id and ranges from 1 (0 is used for the background).
G is for the instance attributes. Currently, four attributes are used, and they are “truncated”, “occluded”, “crowd” and “ignore”.
Note that boxes with “crowd” or “ignore” labels will not be considered during evaluation.
The above four attributes are stored in least significant bits of G. Given this, G = (truncated << 3) + (occluded << 2) + (crowd << 1) + ignore
. Finally, the B channel store the “ann_id” for instance segmentation and the A channel for segmentation tracking,
which can be computed as (B << 8) + A. The below image is for reference.

Format Conversion
Coordinate System
During our labeling, we regard the top-left corner of the most top-left pixel as (0, 0).
In our conversion scripts, the width is computed as x2 - x1 + 1 and height is computed as y2 - y1 + 1,
following the Scalabel format.
This manner is consistent with MMDetection 1.x and
maskrcnn-benchmark.
Note that, pycocotools,
MMDetection 2.x, and
Detectron2 adopt a different definition.
For these, you can use to_coco to convert the annotations to COCO format, which will be consistent.
from_coco
from_coco converts COCO format JSON files into BDD100K format:
python3 -m bdd100k.label.from_coco -i ${input_file} -o ${out_path} [--nproc ${process_num}]
process_num: the number of processes used for the conversion. Default as 4.
to_mask
You can run the conversion from poly2d to masks/bitmasks by this command:
python3 -m bdd100k.label.to_mask -m sem_seg|drivable|lane_mark|ins_seg|pan_seg|seg_track \
-i ${in_path} -o ${out_path} [--nproc ${process_num}]
process_num: the number of processes used for the conversion. Default as 4.
to_color
You can run the conversion from masks/bitmasks to colormaps by this command:
python3 -m bdd100k.label.to_color -m sem_seg|ins_seg|seg_track \
-i ${in_path} -o ${out_path} [--nproc ${process_num}]
process_num: the number of processes used for the conversion. Default as 4.
to_coco
to_coco converts BDD100K JSONs/masks into COCO format.
For detection, box tracking, and pose estimation, run this command:
python3 -m bdd100k.label.to_coco -m det|box_track|pose \
-i ${in_path} -o ${out_path} [--nproc ${process_num}]
process_num: the number of processes used for the conversion. Default as 4.
For instance segmentation and segmentation tracking, converting from JSON, JSON + Bitmasks, and from Bitmasks are all supported. For RLEs, use this command:
python3 -m bdd100k.label.to_coco -m ins_seg|seg_track \
-i ${in_path} -o ${out_path} [--nproc ${process_num}]
For Bitmasks, use this command:
python3 -m bdd100k.label.to_coco -m ins_seg|seg_track \
-i ${in_path} -o ${out_path} -mb ${mask_base} [--nproc ${process_num}]
mask_base: the path to the bitmasks
If you only have Bitmasks in hand and don’t use the scalabel_id field, you can use this command:
python3 -m bdd100k.label.to_coco -m ins_seg|seg_track --only-mask \
-i ${mask_base} -o ${out_path} [--nproc ${process_num}]
mask_base: the path to the bitmasks
to_rle
You can run the conversion from masks/bitmasks to RLEs by this command:
python3 -m bdd100k.label.to_rle -m sem_seg|drivable|ins_seg|seg_track \
-i ${in_path} -o ${out_path} [--nproc ${process_num}]
process_num: the number of processes used for the conversion. Default as 4.